Precision aerial sowing of baits for possum control

The Tracmap GPS-controlled Landcare Research/HeliOtago cluster-sowing bucket. Image - Grant Morriss.
Aerial baiting is a crucial technology in possum and rat control, and for over 20 years has involved sowing from a helicopter along GPS-guided parallel flight paths 100–200 m apart. A spinner under the sowing bucket spreads the bait over a swath at least as wide as the flight-path spacing, thereby ensuring no part of the area is unbaited. However, the vagaries of wind, topography, and pilot skill in following designated flight paths can lead to some imprecision in where the margins of the baited swath occur. That imprecision requires buffers around the area to be baited and around exclusions zones within it to be set conservatively wide, creating scope for possums and rats to survive.
To overcome this problem, new techniques of sowing bait in clusters or strips have been developed. In the case of strip sowing, the spinner is slowed down, and bait falls from the aircraft continuously, while for cluster sowing, the bait falls in clusters intermittently through a controlled-release ‘gate’. The main research aim was to find ways to reduce baiting costs by reducing the amount of toxic bait sown, and, for strip sowing only, to enable the use of lower-cost fixed-wing aircraft rather than helicopters to sow the bait (see Kararehe Kino Issue 14). However, cluster sowing in particular opens the door to more precise control over where bait is sown, because the size of each bait cluster (typically 8–10 m by 10–15 m is much smaller than the size of a continuous 100–180 m wide broadcast swath.
As part of the process of developing a bucket designed specifically for cluster sowing Graham Nugent and Grant Morriss worked with Graeme Gale (HeliOtago), Tony Michelle (Amuri Helicopters) and Colin Brown (TracMap NZ) to produce a lightweight medium-sized prototype with a GPS-controlled cluster release mechanism. GPS-control of the bait-release gate ensured bait was reliably released at specified intervals along the flight path. For the first time, sowing rate was independent of helicopter speed, and more consistent than traditional sowing.
Table Cluster size and throw-forward distance of bait clusters, relative to the location at which they were released.
| Flying speed (knots) |
Flying height (m) |
Average cluster length (m) |
Average cluster width (m) |
Throw forward (m) |
|---|---|---|---|---|
| 40 | 50 | 5.9 | 3.7 | 49.5 |
| 40 | 50 | 6.6 | 4.6 | 43.0 |
| 40 | 100 | 6.8 | 5.9 | 49.0 |
| 40 | 100 | 8.5 | 5.8 | 61.5 |
| 50 | 50 | 7.2 | 3.9 | 57.3 |
| 50 | 50 | 6.3 | 4.9 | 61.5 |
| 50 | 100 | 8.8 | 6.0 | 68.0 |
| 50 | 100 | 11.3 | 5.8 | 66.0 |
| 60 | 50 | 11.8 | 4.9 | 68.0 |
| 60 | 50 | 8.6 | 8.2 | 63.5 |
| 60 | 100 | 10.7 | 7.9 | 78.5 |
| 60 | 100 | 13.4 | 6.4 | 80.0 |
| Average | 8.5 | 5.5 | 60.7 |
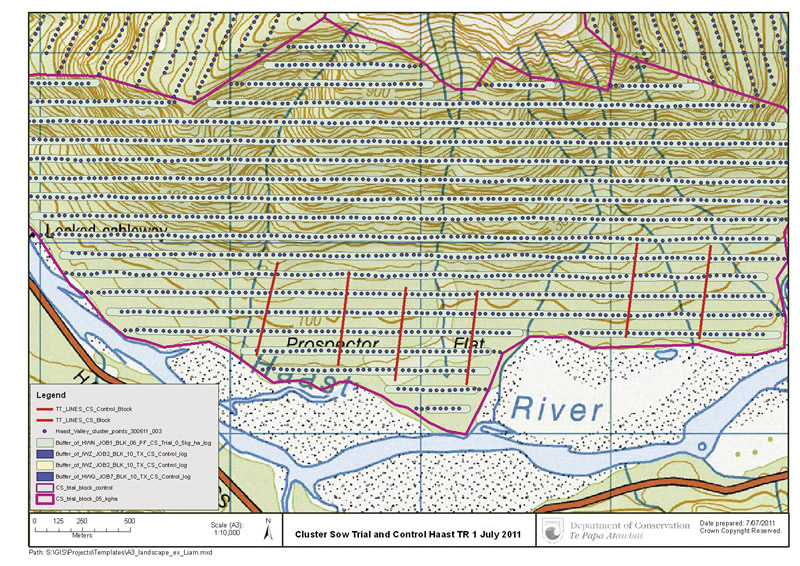
Initial sowing trials were conducted in April 2010 using a helicopter flown at different heights and different speeds. The bucket was then used operationally in two large-scale field trials and delivered high-density bait clusters at 50-m intervals on 100-m-spaced flight paths (i.e. <2% of the landscape; Fig. 1).
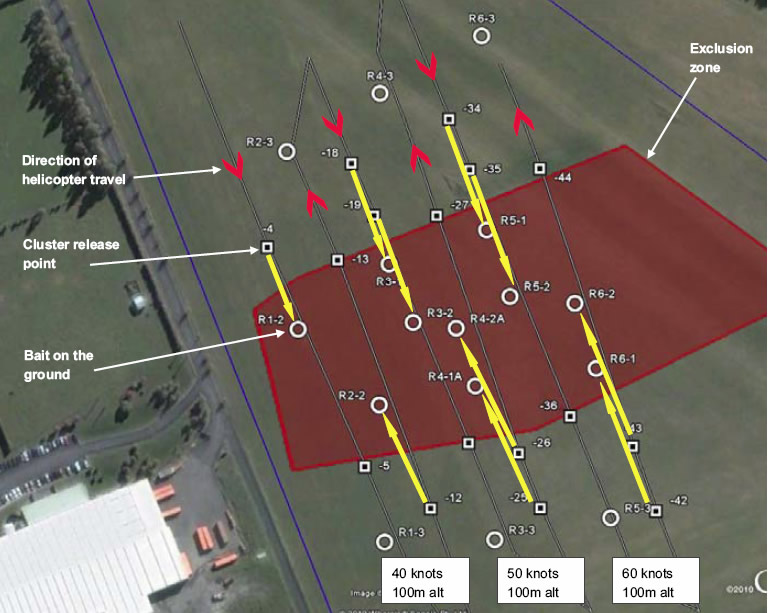
However, the prototype GPS-controlled release system relied on the pilot to initiate and terminate sowing along the flight path leaving a small risk of ‘overflies’ in which sowing continued briefly over a designated boundary. To eliminate this risk, TracMap extended the GPS-control software to include an automatic shut-off over exclusion zones and boundaries. Preventing overflies but still delivering bait up to the boundaries of control areas is surprisingly complicated. This is because the forward speed of the helicopter is imparted to the bait when it is released, with the ‘throw-forward’ distance between the release point and landing point of the bait varying with helicopter speed and its height above the ground (Fig. 2).
The prototype automatic shut-off system worked as envisaged, with no cluster release points in the bait exclusion zone. However, forward momentum carried some bait well into it (Fig. 2, Table). This led to the development of a throw-forward buffer (TFB) in the software that turns the sowing on or off a set number of seconds in advance of a boundary. At 40 knots, a TFB of 1.5 seconds equates to approximately 30 m, so the software would turn sowing on (or off) 30 m before the boundary.
In a test of the system with a TFB, the zigzag effect arising from the alternate direction of successive flight paths was much reduced and all but one of the bait clusters fell at least 10 m outside the nominal exclusion zone. That cluster aside, the results indicated that at 40 knots, it is feasible to reduce buffer widths to as little as 60 m, well within the home-range diameter of possums and rats.
This research and development indicates that controlled cluster sowing has potential to improve the precision of bait placement in relation to area boundaries, and could be used to avoid sowing bait in narrow buffers (<100 m) around waterways and tracks without greatly increasing the risk of not exposing some possums and rats to toxic bait. Such safety features are likely to be critical if aerial poisoning is scaled up to help achieve Predator-Free New Zealand.
This work was done under contract to the Animal Health Board.
Graham Nugent & Grant Morriss
Fig. 1 Map of cluster release points in a large-scale field trial, showing the designated flight paths (turquoise bands) and cluster release points (green dots).
Fig. 2 Distribution of non-toxic bait clusters resulting when the GPS-controlled cluster-release software was programmed to prevent cluster release when the helicopter was inside the red exclsusion zone (i.e.with no throw-forward buffer). The red arrow heads indicate the direction of helicopter trial, and the yellow arrows link cluster release points (squares – bait clusters are numbered) to where the bait landed on the ground (circles). (R is the baiting run number).