Remote monitoring of traps and vertebrate pests
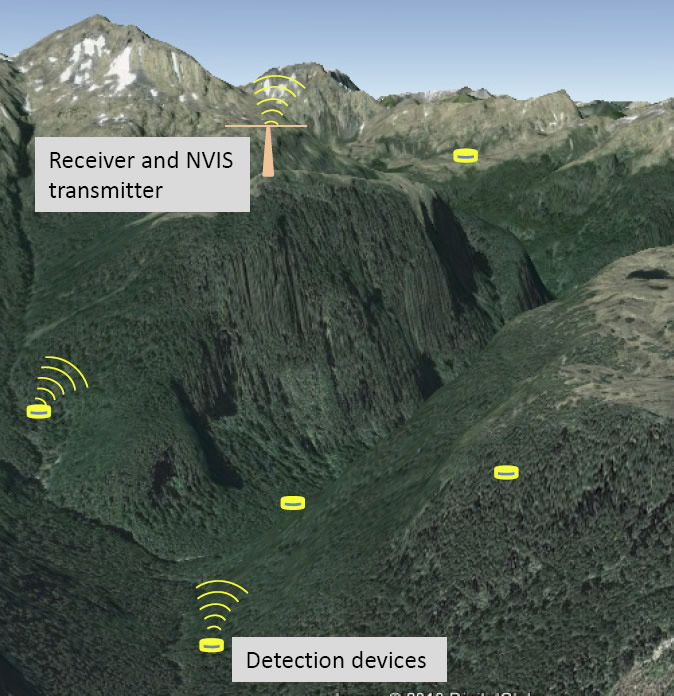
Detection devices transmitting information to a base receiver that sends the data to a computer for near real-time monitoring.
Current technologies associated with the pest control industry such as traps, chewcards, wax blocks, or trail cameras all require manual checking, either daily (e.g. leghold traps), weekly (e.g. chewcards) or longer (e.g. kill traps and trail cameras). Because trapping and monitoring is often carried out over large, remote areas, any physical checking is expensive both in terms of travel and staff time. This is especially so for areas that are or are planned to be made pest-free in the future as they will require ongoing surveillance to detect invaders and trigger an immediate and targeted response.
The University of Canterbury Wireless Research Centre (WRC) was commissioned by Landcare Research to investigate potential methods for remotely monitoring traps and other detection devices that could significantly reduce servicing costs and provide near-real-time information from the field.
The application of wireless technology in forested terrain has almost been left behind by modern developments in communication, which strive for high data speeds and high density coverage (viz. cellular networks). But the cellular network does not have national coverage and may not work well in forested and mountainous terrain. If wireless technology is to be useful for communication in remote forested areas, there are two major technical issues to overcome: (1) radio waves do not travel easily through foliage, and (2) monitoring devices need to have low power requirements to enable a long operational life.
This project was carried out by two engineering students, Thomas Harding and Richard Jeffcote, as part of their masters degrees, under supervision and technical guidance from the WRC. One project focused on transmitting the status of field-laid traps (i.e. still set or sprung), while the other looked at transmitting images that might be taken by infrared-sensing trail cameras. Each system was designed to send the information back to a central collection point that could be easily accessed remotely.
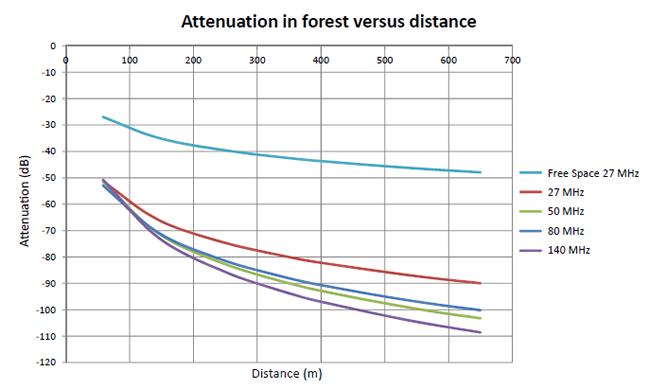
Thomas and Richard investigated the most suitable frequencies for radio propagation in forest, and sought a compromise between very low frequencies that transmit well through and over obstacles and the need to have aerials of a length practical for field use. As an example, a frequency of 6.2 MHz has a wavelength of 48 m and an optimal aerial length of 24 m. Although this frequency is very effective in forest, such aerial lengths are impractical. With testing of propagation performance, and taking account of portability, expected costs, durability, and ease of use, the students found 27 MHz provided a good compromise between transmission efficiency and practicable aerial length (c. 5 m) for transmitting data through at least 500 m of forest (Fig.).
For monitoring the status of traps, Richard developed an innovative method using prime numbers to separate data on the status of multiple traps being received by a single receiver. The transmitter developed used very little power, with an AA battery servicing the unit lasting 800 days – a key requirement for field application in remote areas.
Thomas looked at options for transmitting images and selected an existing analogue slow-scan TV mode, which is low speed but has high sensitivity. Pictures take 1–2 minutes to be transmitted, depending on resolution, but such speeds are more than adequate for monitoring remote sites for the presence of invasive species.
Future work will look at how best to link networks of traps or monitoring devices to receiving stations (Photo) and how to get the information from remote locations (e.g. the middle of Fiordland) to office-based computers so that devices can be monitored in near real-time. One possibility for accessing remote sites that are out of cellular network range is to use the low frequency Near Vertical Incidence Skywave (NVIS) system (i.e. the system used for New Zealand’s mountain radio service).
This work was funded by the Ministry of Business, Innovation and Employment.